Hull hydrodynamics is a critical design constrains for autonomous craft, become exponentially more important with the intended mission duration. One of the most interesting ways to tackle this problem is to borrow from nature, which has elegantly solved the hydrodynamics problem over and over again in a variety of ways.
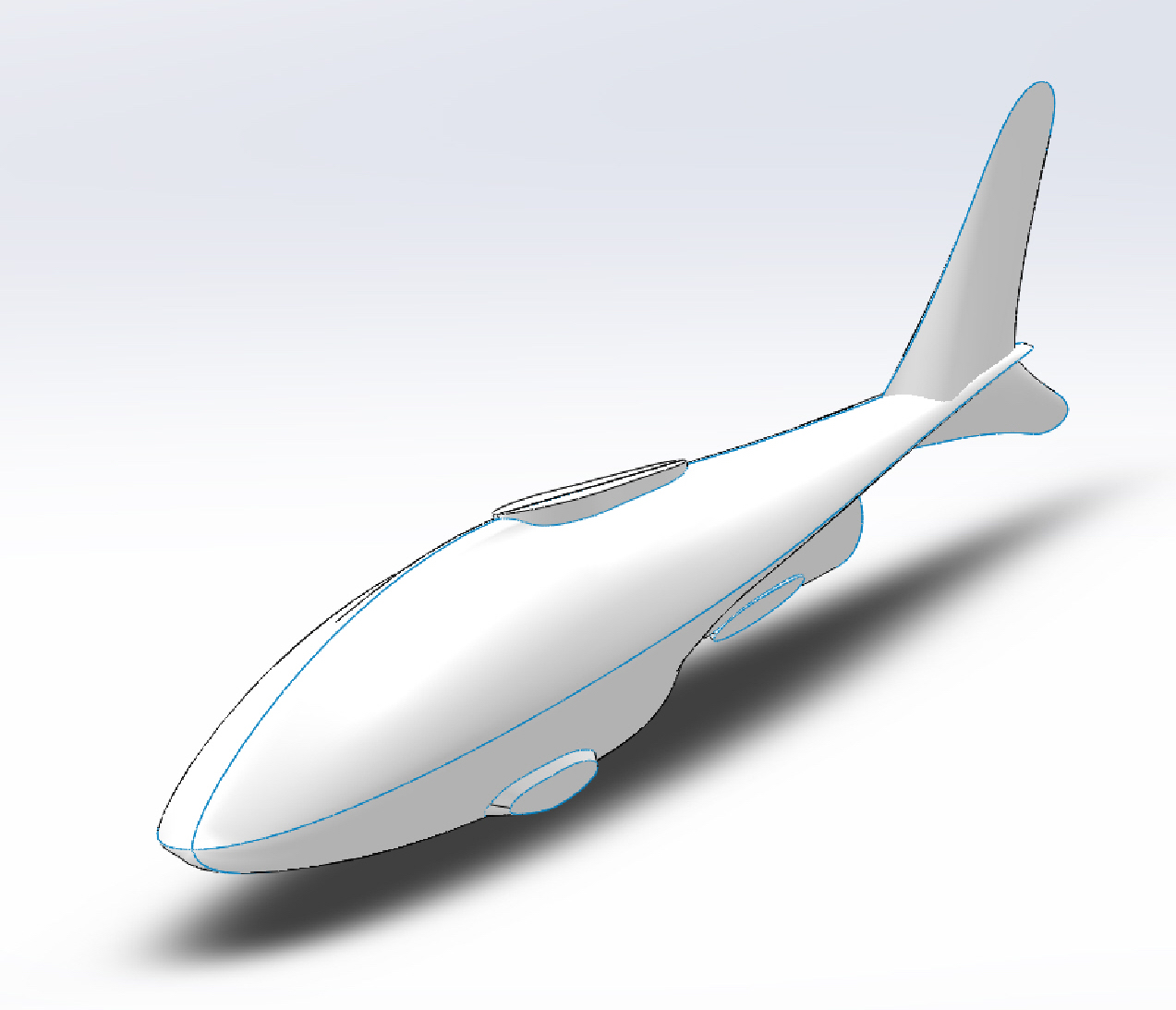
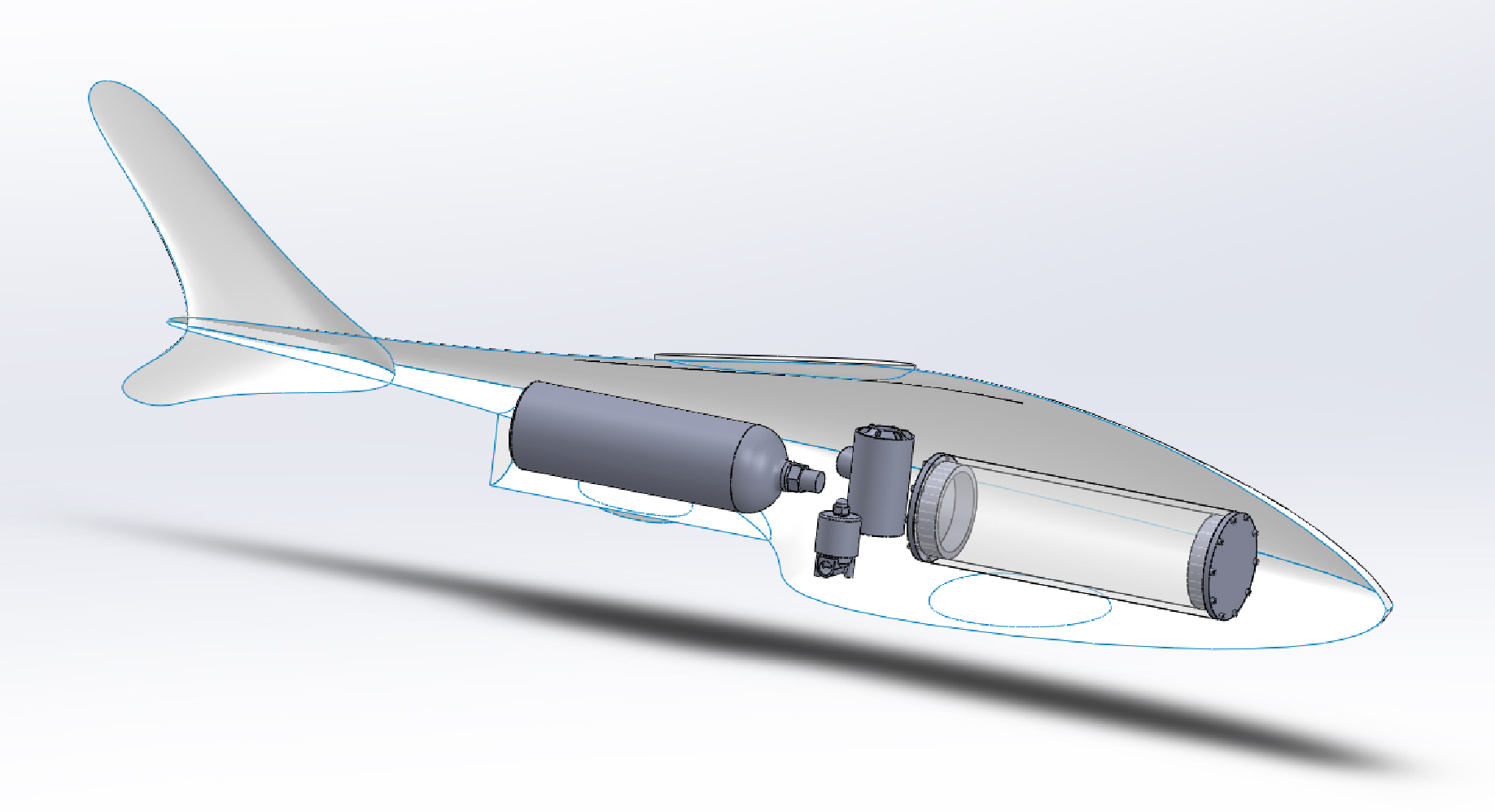
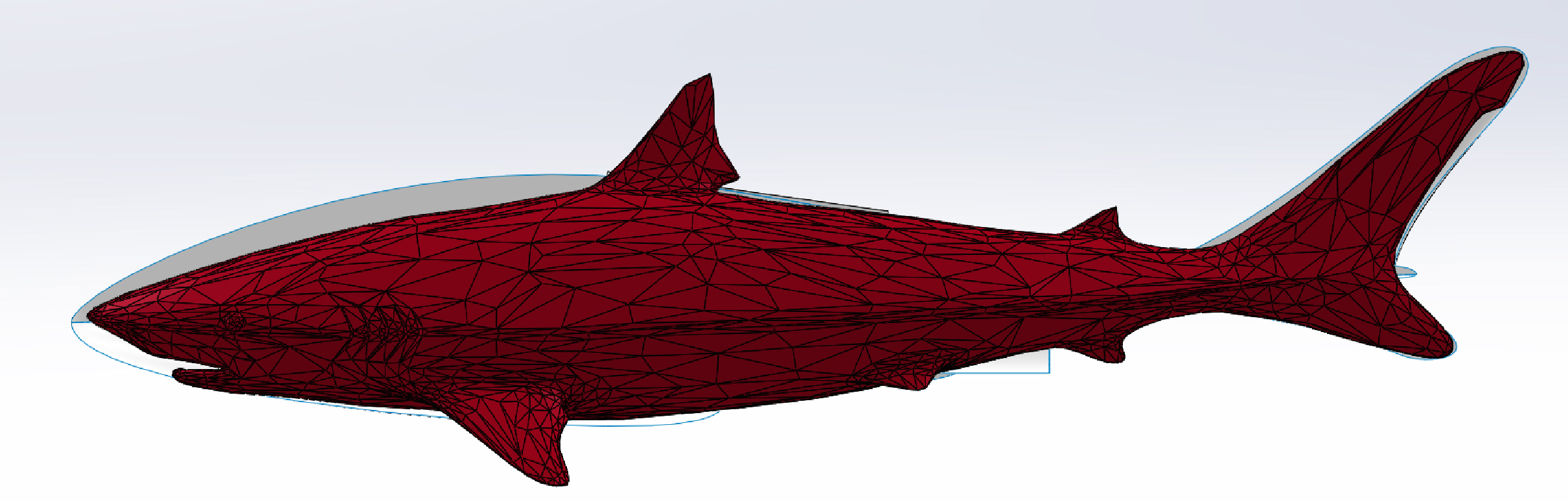
After a number of computer models testing different ideas, a shark inspired hull based on a shark was chosen for our initial research platform. Here you can see the hull concept with its surfaces shown in white, and the red mesh captured from a black tipped reef shark shown in red. In order to accommodate all the required electronics within a hull of the target maximum length, the lines of the head and belly and belly were extended – modeling the modifications after the surface of a whale shark.
The fins on the core hull were replaced with the visible flats, which serve as bolt on mount points for the fins. Bolt on fins and tail modules enable fins to be removed for transport and easily replaced or repaired when damaged. By adding runs for power and data to those mount points later fin and tail designs can contain new functionality such as sensors or active control surfaces.