In the second mockup of the tiny ROV the design grew significantly in size. The major driver of change between V1 and V2 has been adding a bunch of electronics that live inside the electronics chamber. (Electronics chamber is still being designed and is not shown here).
By upgrading to using a raspberry pi zero W – the system gains several orders of magnitude in processing power over the originally planed ESP32 module. Enough that the system could run ROS (the Robotic Operating System) hosted on top of Linux. The PI’s hardware means the system can also easily host an integrated camera, which will in turn mean adding some sort of “porthole” for the camera to look out. Additionally a 10DOF IMU, battery monitoring circuit, and internal temperature sensor were also added to the ROV’s electronics to enable active stabilization and some autonomous operations.
As a lot of the requirements are unknowns – the float buoyancy was increased to neutralize a first order Fermi estimate of mass of the electronics. As each build will likely vary slightly in its parts layout, and thus have a different COM (Center of Mass) skids were added to the base plate that contain pockets for trim weights. The skids should enable trimming an assembled ROV to true at neutral buoyancy.
In order to support bolt on accessories and upgrades V1 of the ROV had threaded mount points on the top of the float. V2 added three channels through the float for cables pass-through points. The goal is that the pass through points will enable future additions to be cleanly wired in such a way as to minimize snagging hazards on the ROVs hull. Similar threaded mount points were also added to the base plate in V2. The lid to the trim weight chambers is removable so trim out can be adjusted as things are bolted onto the ROV changing its mass and COM.
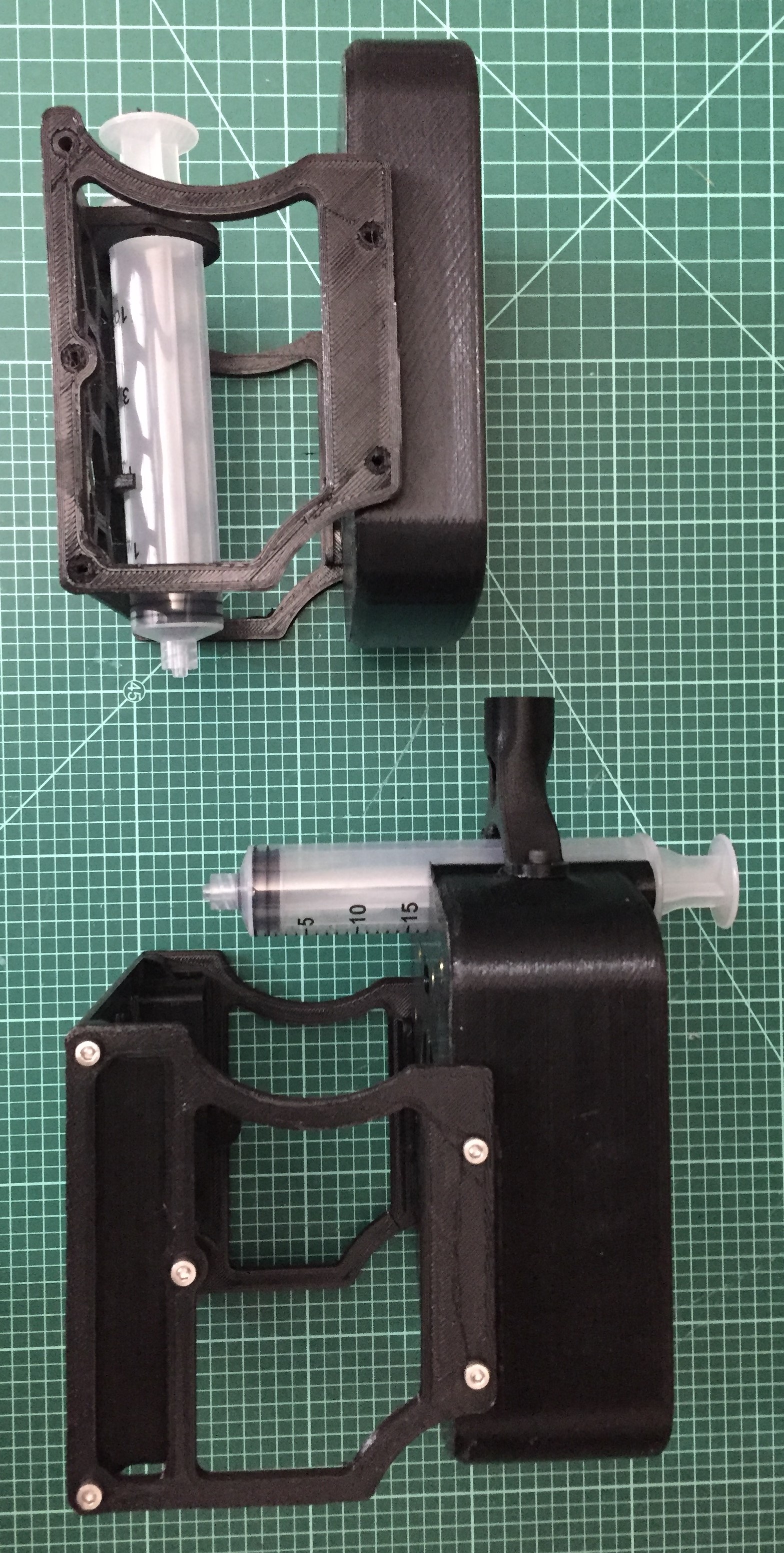
Probably the most obvious change was flipping the syringe from horizontal to vertical. This was done to minimize the change to the hull’s COM as buoyancy is changed to be positive or negative for surfacing and diving operations.